
初期の人類文明において、「人工生命」という想像力は既に根付いていました
西周の宋代(図1参照)では、革、木、漆を用いて「瞬きをし、手招きをし、手足で踊る」舞踏人形が作られ、その人形はとても生き生きとしており、周の穆王でさえ本物と偽物の区別がつかなかったほどでした。
『列子唐文』に記されたこの伝説は、空想的な要素に満ちていますが、東洋文明における初期のバイオニックメカニクスの探求を裏付けています。
一方、西洋神話では、ギリシャ神話の火の神ヘパイストスが青銅の巨人タロス(図2参照)を鋳造しました。タロスの体は液体金属で満たされており、タロスはクレタ島を1日に3回巡回し、巨大な石を投げて侵略者を追い払いました。
彼の唯一の致命的な弱点である足首は、アキレス腱を彷彿とさせ、古代の「自動守護者」の象徴となりました。

図2 巨人タロス

図3 自動守護者
歯車とバネの技術の進歩に伴い、ヨーロッパの宮廷では、筆記・描画ロボットが次々と発明されました。中でも最も有名なのは、1774年にスイスの時計職人ジャック・ド・ヴォーカンソンが開発したロボットです。筆記、描画、さらには音楽演奏まで可能なロボットです(図4参照)。
これらのロボットはそれぞれ数千個の部品で構成され、美しい筆跡を生成したり、肖像画を作成したり、ピアノを演奏したりすることができ、純粋に機械的なロボット工学の最高峰となりました。

図4 音楽演奏ロボット
筆記ロボット
6,000個以上の部品で構成されるこのロボットは、カムシステムを用いて羽根ペンを制御し、40文字からなる短いフレーズを書き込むことが可能
内部のフライホイールは文字の組み合わせを並べ替えることができ、自己調整機能も備えているため、外部電源なしで動作可能です。
画家
4種類の異なる絵画を描くことができ、3軸カム機構によって腕が多方向に動き、目はペン先を追って画家の動きを模倣しました。
ミュージシャン
この女性型ロボットは2,500個のパーツで構成され、胸はまるで呼吸するかのように上下に動きます。演奏を終えると、金属製の円筒に突起が付いており、演奏動作が正確に記録され、感謝の意を表しながら頭を下げます。
これらの作品はヨーロッパの宮廷を驚嘆させただけでなく、海を越えて乾隆帝の貴重な宝物となっています
現在、紫禁城に収蔵されている「銅鍍金書時計」には、「八方九地王来」と書くことができる機械紳士が描かれており、東洋と西洋の機械美の融合を如実に示しています(図5参照)。

図5 銅製金書時計
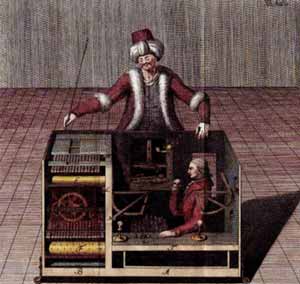
図6 トルコのチェスプレーヤー
18世紀後半には、「トルコのチェスプレイヤー」(図6参照)として知られるロボットが言葉を話し、チェスの名人を難なく打ち負かすなど、神秘的な魔法の箱のようでした。しかし、大火災によってその正体が明らかになり、隠れた操作者による巧妙な欺瞞であることが判明した。
この事件は、知能機械に関する多くの幻想を打ち砕きましたが、驚くべきことに、自動化技術の発展を促し、「人間と機械の協働」の原型となりました。
時は流れ、科学技術の爆発的な発展を遂げた20世紀へと移ります。 1920年、チェコの作家カレル・チャペックは、SF劇『R.U.R.』(ロッサムの万能ロボット)の中で初めて「ロボット」という用語を使用した。これはスラブ語で「強制労働」を意味し、機械に関する脚本のテーマを反映している。
「ロボット」という言葉は、近代の欧米の主要言語で急速に普及し、今日私たちが知っている言葉となりました。ロボットには「アンドロイド」という別の用語もあります。
これは、フランスの作家オーギュスト・ヴィリエ・ド・リル=アダンが1886年に発表したSF小説『未来のイヴ』に由来しています。
この小説では、人間に似た機械が「アンドロイド」と呼ばれています。2003年、アンディ・ルービンはオペレーティングシステム会社を設立し、広く知られるようになった小さな緑色のロボットにちなんで社名を付けました。
話を1927年に戻すとウェスティングハウス・エレクトリック社がハーバート・テレボックス(図7左参照)というロボットを発明したのです。
このロボットは、回路基板の上に人型のシェルを備えた音声制御スイッチを搭載しており、ハイテク製品として販売されました。1937年、ウェスティングハウス社はエレクトロ(図7右参照)という別のロボットを発表しました。
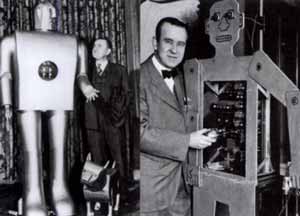
図7 Herbert Televox(左) Elektro(右)
このロボットは20種類の音声コマンドを認識し、歩行などの動作を実行できました。その後、ヒューマノイドロボットの開発がトレンドとなり、多くの企業や研究機関が協力して、外見はピカピカだが中身は空っぽという特徴を持つ様々なロボットを開発しました。
1939年、スウェーデンの発明家オーギュスト・ハンマーは、無線指令に反応して歩行できるロボットを開発しました。1951年には、アメリカのクリフォード・ランタスがゴルフスイングができるロボットを開発しました。
1953年には、人間の操作下で複数のタスクを実行できるガルコロボットが登場しています。
そして1963年には、NASAが30以上の人間の動作を模倣し、宇宙服を着用できる「多関節マニピュレーター」を開発しました。
当時の技術水準を考えると、ヒューマノイドロボットの開発は行き詰まりを見せ、人間の肉体労働を代替する産業用ロボットの開発が今後の方向性と思われました。
油圧二足歩行から電動バイオミメティックロボットへ
誰もが産業用ロボットの開発を競い合っていた1972年、早稲田大学の加藤一郎教授は世界初のフルサイズヒューマノイドロボットWABOT-1(図8左参照)を発表しました
このロボットは身長2メートル、体重160キログラムで、カメラとセンサーを搭載し、歩行、運搬、簡単な会話が可能で、1歳半児とほぼ同等の知能を備えており、ヒューマノイドロボットの歴史における「画期的進歩」と評されました。
1984年には、WABOT-2(図8右参照)が発表され、大きな技術的進歩を示しました。WABOT-2はより自然な日本語での会話が可能になり、視覚と触覚の知覚能力が向上し、楽譜を読み取ってそれに基づいて電子キーボードを柔軟に演奏する能力に優れていました。
WABOT-2は、テクノロジーの火を一瞬にして灯した孤高の星のようでしたが、小さな火花でさえも大草原の火を燃え上がらせる力を持つのです。
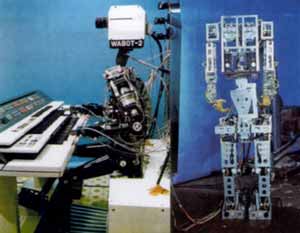
図8 WABOT-1(左) WABOT-2(右)
高度化された開発
Hondaは1986年にヒューマノイドロボットの分野に参入し、15年間のたゆまぬ努力を経て、数々の試作機の発売に成功しました。
初期のEシリーズは脚部動作技術に重点を置き、その後、エンジニアたちは頭部、胴体部、腕部などのコンポーネントを追加することで、ロボットのバランスと機能性を向上させました。

図9 HONDAが開発したロボット達
HondaのEシリーズ、Pシリーズ、ASIMOシリーズロボットの機能性
Hondaは1993年にP1ヒューマノイドロボットを初めて発売し、その後1996年と1997年にP2とP3モデルを発売しました(図9参照)。
ヒューマノイドロボットが再び注目を集めるきっかけとなったのはP3でした。身長1.6メートル、体重130キログラムのP3は、複数のカメラから画像情報を収集する3次元ビジョンシステムを搭載し、ステレオビジョンアルゴリズムを使用して周囲環境の3Dモデリングとターゲット認識を実現しています。
バランスシステムは、慣性計測ユニット(IMU)と足圧センサーを使用してロボットの姿勢と重心をリアルタイムで監視し、安定した二足歩行と障害物の自動回避を可能にしました。
さらに、音声インタラクション機能も備えており、音声認識・合成技術により人間との簡単なコミュニケーションが可能となった
手のアームは最大2kgの荷重を持ち上げることができ、マグネシウム亜鉛電池で駆動し、25分間の動作が可能でした。
2000年、ホンダはP3をさらに発展させ、主力製品であるASIMOを開発しました。
実用化には一定の制約がありましたが、ASIMOはヒューマノイドロボット技術の展示と普及に重要な役割を果たし、様々な重要なイベントに頻繁に登場した事を覚えている人も多いはずです。
初代ASIMOは身長120cm、体重43kgで、走行と跳躍が可能でした。視覚と聴覚センサーを用いて経路を計画し、人間との衝突を回避したり、音声や手話でコミュニケーションをとったりすることができました。
お茶を淹れたり、ダンスをしたりといった複雑な作業もこなすことができ、2005年には、身長130cm、体重54kgの2代目ASIMOを発売しました。
このバージョンは、事前に動作をプログラムし、音声やジェスチャーに基づいて人間の指示に応答することで、基本的な記憶力と認識能力を発揮しました。
2011年には、認知機能と身体協調性を向上させた3代目ASIMOが発売されました。 ASIMOは複数の話者を同時に認識し、動作範囲を拡大し、最高速度を時速6kmから時速9kmに向上させ、ボトルキャップを開けたり、カップを拾ったり、手話までできる器用な手を備えていました。
このアップデート以降、さらなる進化は見られず、ユニット1台あたり数百万ドルの費用がかかり、高額な投資によりホンダは2018年にASIMOの開発を中止せざるを得ませんでした。
2022年、ASIMOは最後のパフォーマンスを披露し、かつて人気を博したこのロボットは引退を告げました。
次世代開発フェーズ
このフェーズの後、ヒューマノイドロボットの技術的方向性は動作の強化へと移行し始め、ボストン・ダイナミクスのヒューマノイドロボット「アトラス」がこのトレンドを象徴しています。
10年間の技術蓄積を経て、ボストン・ダイナミクスは2013年に第1世代のヒューマノイドロボット「アトラス」を発表しました(図10、左上参照)。
このロボットはかなり重く、ターミネーターのような体躯で、身長1.8メートル、体重150kgでした。視覚システム、レーザー距離計、ステレオカメラを搭載し、四肢には28自由度を備え、微細な動きを可能にした。
しかし、長い電源ケーブルが必要で、障害物を認識して回避する能力はあるものの、歩行は実験室レベルでしかできませんでした。SF的な外観とは裏腹に、これは初期の試みに過ぎませんでした。

図10 ボストンダイナミクス Atlas
2016年には、高さ1.5メートル、重量80キログラムに最適化したアトラスの新バージョン(図10左下参照)がリリースされ、駆動システムは油圧式から電動油圧ハイブリッド式に変更、体中のセンサーによって障害物を回避しながら自律歩行が可能になりました。
2017年にはさらなるアップグレードが行われ、ジャンプや宙返りが可能になりました。2018年までにアトラスはより人間に近いスキルを獲得し(図10右下参照)、パルクール、ダンス、物の運搬、投げる動作を学習し、複雑な指示に従う能力を示しました。
アシモと同様に、アトラスも研究開発費の高騰と商品化の難しさに直面し、8年間でGoogle、ソフトバンク、ヒュンダイと3度もオーナーが変わりました。最終的に、当初の油圧技術の道を断念し、より普及性の高い電動化技術を採用しました。こうして誕生したアトラスの電動バージョン(図10右参照)は、「電動貞子」というユーモラスな愛称で呼ばれました。
人工知能の搭載
2021年、テスラはヒューマノイドロボット分野への参入を発表し、世界中のテクノロジーコミュニティに大きな衝撃を与えました。
同社の自動運転、AIコンピューティング、バッテリー技術の進歩は、オプティマスロボットに直接統合され、急速な開発を可能にしました。2022年には、テスラは第一世代のプロトタイプ(図11参照)を発表しました。身長約173cm、体重約73kgと、人間に酷似したデザインを特徴としています。手を振ったり、物を運んだり、植物に水をやったりといった動作が可能です。
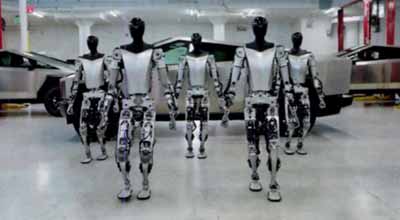
図11 テスラ 第一世代Optimus
テスラは2023年に第2世代のOptimus(図12参照)を発売
このロボットは歩行速度が30%向上し、身体協調性が向上し、触覚センサーを搭載したハンドジョイントがアップグレードされています。

図12 テスラ 第二世代Optimus
2024年10月に開催された「We, Robot」発表イベントでは、最新のOptimusロボットが飲み物を注ぐ、パンチの予測、ハートサイン、ダンスなど、様々な能力を披露しました(図13参照)。

図13 We,Robot Optimusの展示会での様子
2014年11月には、Optimusの器用なハンドの進化に関する最新情報が公開され、テニスボールを空中で連続キャッチする能力が披露され、視覚認識、フィードバック速度、動作制御能力がさらに実証されました。
継続的な技術進歩とコスト低下により、Optimusは将来的に大量生産され、産業オートメーションやホームサービスなどの分野で重要な役割を果たすことが期待されています。
国際競争:開発から大規模生産ラインへの道
2025年には、国内外の企業がコア技術とシーン適応をめぐって競争を繰り広げます。
国際セクション:技術リーダーシップとシーン開発

図14 各メーカーのロボット
図15 各メーカーのロボット2
1. Agility Robotics Digit:物流におけるブレークスルー
アジャイルロボットDigitは、米国Agility Robotics社が開発した、現在商用展開されている初のヒューマノイドロボットです(図14参照)
独自のダチョウ脚デザインとダイナミックな二足歩行能力で知られ、身長175cm、体重65kgで、優れた知覚能力と行動実行能力を備えています。物流や倉庫管理における幅広い用途に加え、いくつかの研究実験シナリオでも検討されています。Digitロボットの最初のバッチは2024年に25万ドルで納入され、将来的にはAIを搭載した大規模モデルを統合し、さらに知能を高める計画です。
2. ボストン・ダイナミクス Atlas 電動バージョン:動作性能の限界に挑戦
Atlas 電動バージョンは、ボストン・ダイナミクスが発表した画期的な全電動ロボットです(図14参照)
油圧システムを廃止し、軽量な電動駆動を採用しています。機械構造は軽量で、よりスムーズで静かな動作を実現します。
シンプルなデザインで、頭部には機能的な円形ディスプレイを搭載し、各種センサーと強力なコンピューティング制御システムを備えています。多くの複雑な動作を実行でき、ある程度の自律的なエラー修正機能も備えています。
ボストン・ダイナミクスは自動化プロセスを継続的に進化させていますが、完全な自動化はまだ実現していません。用途としては、産業・物流分野だけでなく、科学探査においても重要な役割を果たします。ボストン・ダイナミクスは2025年に量産を開始する予定です。
3. Figure 01/02:AIを活用した産業革命
Figureは、NVIDIA、Amazon、Microsoftなどの企業から複数回の資金調達ラウンドを経て、2体のヒューマノイドロボット「Figure 01」と「Figure 02」をリリースしたアメリカのヒューマノイドロボットメーカーです。
Figure 01は高さ1.4m、重量60kg、可搬重量15kg、バッテリー駆動時間5時間で、最高速度1.2m/sに達します。OpenAIの大規模モデルに接続することで、人間とのインタラクション、コマンドの理解、記憶、視覚体験の描写が可能になります。アップグレード版の図02(図14参照)は、バッテリー容量が2倍、手の自由度が16、重量25kgの物体を運ぶことができ、20時間以上稼働し、前世代の3倍の計算能力を持ち、OpenAIのカスタムAIモデルを搭載し、BMW工場でテストを開始しているとのことです。
4.X Technologies NEO:ホームサービスにおける静かな革命
NEOは、ノルウェーのX Technologiesが開発した家庭用ロボット(図17参照)で、身長1.65m、重量30kg、70kgの荷物を持ち上げることができます。静かに、そしてスムーズに家事をこなします。人間の筋肉を模倣したデザインで、安全性とインタラクション性を重視しています。
5.その他の革新的力
Amecaロボット(図18参照)は英国企業によって開発され、52個のモジュールと51種類の関節動作を備え、複雑な表情や多様な身体動作を実現できます。GPT-4を統合することで、自律性と認知的インタラクション能力が向上し、人と自然なコミュニケーションをとったり、受付や案内といった静的タスクを実行したりすることが可能になりましたが、現時点では歩行機能は備えていません。
Clone Alphaは、ポーランドのClone Robotics社が開発した、未来のヒューマノイドロボットの究極の形であると主張しています(図15参照)。生体模倣設計を採用し、人間の構造を完全に模倣しています。200個以上の骨と生体模倣呼吸器系を備え、動作には人工臓器、人工筋肉、靭帯を使用しています。骨格系には206個の骨と完全に可動する関節が含まれており、上半身には164自由度があります。さらに、70個の慣性センサー、320個の圧力センサー、4台の深度カメラを搭載し、500Wのポンプで駆動する油圧式「血管システム」によって筋肉の動きを促進します。

図16 Apptronik社製Apollo Robot
6.Apptronik社製Apollo Robot
アメリカのApptronik社が開発したApollo(図16参照)は、高さ1.73m、重量73kgで、倉庫や工場での作業を支援するように設計されています。積載量は25kg、ホットスワップ可能なバッテリーパック、4時間の稼働時間、そして電子インクを使用した顔と胸の情報画面を備えています。
中国での製造業の優位性とシーンのブレイクスルー
中国のヒューマノイドロボット開発は比較的遅れて始まりましたが、国防科技大学、ハルビン工業大学、清華大学、北京理工大学、浙江大学など、複数の大学を起点として急速に発展してきました。2000年、国防科技大学は中国初のヒューマノイドロボット「パイオニア」を発表しました。その後15年間で、中国のヒューマノイドロボットは大学の研究室から産業界へと移行し、2012年にはUBTECHなどの企業がこの分野に参入しました。2016年の春節祝典では、UBTECHが開発した540台のAlpha ISロボットが歌手の孫楠(スン・ナン)と共演し、その商業的可能性を示しました。新しく発表されたWalkerシリーズのロボットは、2019年の春節祝典に再び登場しました。2020年以降、技術革新と政策支援により、特に2023年以降、ヒューマノイドロボット企業は爆発的な成長を遂げています。
1.Unitree H1/G1:文化的シンボルと技術ベンチマーク**
Unitree Technologyは、H1とG1という2種類のヒューマノイドロボットを保有しています。H1は身長180cm、体重47kgで、50以上の自由度を持ち、脚関節の最大トルクは360N-mです。2025年の春節祝賀会では、16台のUnitree H1ヒューマノイドロボットがハンカチを振りながら踊り、独特の「サイバー」楊歌パフォーマンスを披露しました。G1ロボット(図17参照)は身長127cm、体重35kgで、合計23の自由度を持ち、アクセサリを追加することで43の自由度まで拡張できます。 G1は、立ち上がる、座る、折りたたむ、棒を持って踊る、片足でジャンプする、静止状態から飛び立つ、360度回転する、空中で開脚する、階段を安定して登るといったダイナミックな動作を実行でき、コンシューマーグレードのヒューマノイドロボットの先駆者となる可能性を秘めています。

図17 .Unitree G1
2.Fourier GR7/GR-2:医療分野と産業分野における2つの画期的進歩**
上海張江に本社を置くFourier Roboticsは、GR7とGR-2という2種類のヒューマノイドロボットを発表しました。GR7は高さ1.65m、重量55kg、40自由度を備えています。GR-2ロボット(図18参照)は53自由度にアップグレードされ、高さ1.75m、重量63kgです。どちらのロボットも生体模倣動作能力と認知知能を備えており、産業、医療、教育、家庭サービスなどの用途に適しています。

図18 Fourier GR-2
3.小鵬鉄:自動車の遺伝子による異業種連携のエンパワーメント
小鵬鉄ヒューマノイドロボットは、小鵬汽車が発表した新しいAI製品です(図19参照)。身長178cm、体重70kg、合計62自由度(うち手関節15自由度)を備え、柔軟かつ精密な動作を実現します。自社開発のAIチップを搭載し、人間の思考をシミュレートするほか、小鵬汽車のイーグルアイビジョンシステムを統合し、720度の環境認識を実現します。すでに小鵬汽車の工場で実用訓練を実施しており、将来的には店舗サービスへの応用も予定されています

図19 小鵬汽車 Iron
4. Zhiyuan Expedition A-1/A-2:アクシデントへの対応
上海臨港に拠点を置き、Huaweiの「天才青年」であり、UPマスターとして知られるZhi Hui Jun氏によって設立されたZhiyuan Roboticsは、ExpeditionヒューマノイドロボットA1を発表しました。
高さ175cm、重量53kg、49自由度、最高速度7km/h、片腕最大荷重5kgを備えています。A2シリーズ(図20、図21参照)には3つのロボットが含まれています。標準版のA2は高さ169cm、重量69kgで、人間とのスムーズなコミュニケーションが可能です。
A2-Wは高さ163cm、重量230kgで、独自の双腕車輪構造により複雑なタスクを正確に実行できます。 A2-Maxは高さ175cm、重量85kg、67自由度を備え、高負荷の特殊作業シナリオを対象としています。各モデルがそれぞれの用途に対応し、Zhiyuan Roboticsのアプリケーション領域を総合的に拡大しています。
図20 Expedition A2(左) A2-MAX(右)

図21 Expedition A2-W
5. Zhongqing Robotics SE01:自然歩行ヒューマノイドの未来
Zhongqing Roboticsは、世界初の自然歩行ロボットSE01を発表しました(図22参照)。SE01は、独自の自然歩行により、
従来のヒューマノイドロボットのぎこちない歩行スタイルを打破します。高さ170cm、重量55kgのこのロボットは、航空宇宙グレードのアルミニウム合金製で、32自由度を備えています。
完全な独立知的財産権を持つエンドツーエンドのニューラルネットワークアルゴリズムと自社開発のモーター制御システムを搭載し、しゃがむ、腕立て伏せ、走る、ジャンプする、掴むといった複雑な動作を容易に実行できます。
その他の家庭用ロボットとしては、星東曦園、大敏、アイアンマン、楽居、朱雍迪動力、小米科技鉄达、エレファントロボティクスなどが挙げられますが、ここでは詳細は割愛します。一言でまとめると、ヒューマノイドロボットの未来は間違いなく米国と中国が関わってくるでしょう。

図22 Zhongqing Robotics SE01
境界を破る:倫理の山と未来ビジョン
春節祝賀会の舞台でUnitree H1がハンカチを投げたとき、この行動はヒューマノイドロボットが「道具」から「社会参加者」へと変貌を遂げたことを象徴しています。
ヒューマノイドロボットの開発は、技術と倫理の交差点に位置しています。彼らの技術革新は、生産性を根本から変えるだけでなく、「人間と機械の境界」に関する哲学的な問いを投げかけます。雇用への影響から感情の刺激、軍事化のリスクから法的アイデンティティの紛争まで、倫理的な課題と未来像が絡み合い、ヒューマノイドロボット開発の二重の物語を形成しています。
ヒューマノイドロボット技術の道のりは、倫理、合法性、そして社会受容性に関する数々の試練に直面しています。仕事から帰宅すると、ヒューマノイドロボットが夕食を用意し、思慮深く音楽を演奏してくれている未来を想像してみてください。ソファに座り、近くでヒューマノイドロボットが話しかけてくる。これは空想ではありません。未来は既にここにあり、ヒューマノイドロボットは「つまずきながら」も着実に私たちに近づき、笑い、挑戦、そして無限の可能性をもたらしてくれるのです。